Разработка систем управления
Одно из направлений деятельности НПО «РИТ» связано с созданием систем управления различными объектами, к которым относятся лазерные гравировальные устройства, специальные устройства управления механическими системами и системы управления различными типами электродвигателей.
Разработка систем управления лазерным гравировальным комплексом (ЛГК)
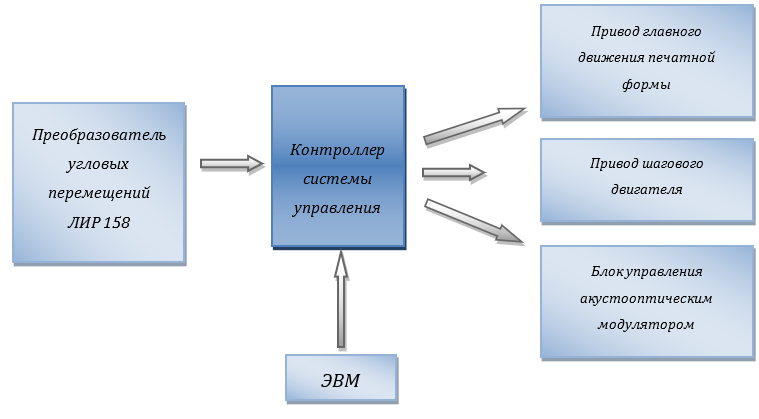
Система управления лазерным гравировальным комплексом включает:
- IBM совместимый компьютер;
- контроллер СУ;
- привод главного движения печатной формы;
- привод шагового двигателя для перемещения фокусирующего объектива;
- преобразователь угловых перемещений ЛИР 158А;
- акустооптический модулятор с блоком управления;
Описание принципа работы ЛГК
Исходными данными для работы ЛГК являются файл с растровым бинарным изображением и характеристики профиля печатного элемента. Преобразователь угловых перемещений механически связан с валом печатной формы и предназначен для ввода угловых координат положения вала печатной формы в контроллер системы управления. Вращательное движение вала печатной формы осуществляется с помощью привода главного движения печатной формы. Перемещение каретки с фокусирующим объективом осуществляется шаговым двигателем, команду на перемещение и значение шага перемещения выдает контроллер системы управления. После включения привода вращения печатной формы и запуска управляющей программы на основе работы трехмерной прогнозной модели осуществляется формирование заданного профиля печатного элемента при постоянной мощности лазерного излучения. Управление положением лазерного луча осуществляется с помощью акустооптического модулятора, управляемого контроллером системы управления.
Разработка систем управления производственными линиями
Система управления производственной линией изготовления рельефных обоев способом тиснения в регистр.
Состав линии:
- узел раската напечатанного изображения (первого слоя бумажного полотна);
- узел раската второго слоя бумажного полотна;
- накопитель первого слоя бумажного полотна;
- накопитель второго слоя бумажного полотна;
- узел склейки;
- накопитель узла склейки;
- узел управления натяжением бумажного полотна;
- тиснильный узел;
- сушильная камера;
- накопитель сушильной камеры;
- узел раската в рулоны.
Принцип работы линии
Бумажное полотно с узлов раската первого и второго слоя поступает в накопители первого и второго слоя бумажного полотна. Далее проходит через узел склейки. После узла склейки поступает в накопитель узла склейки. Затем бумажное полотно поступает в узел натяжения бумажного полотна, который является основным управляющим элементом линии тиснения в регистр. На следующем этапе бумажное полотно поступает в тиснильный узел, в котором бумажному полотну придается рельефная форма. Затем бумажное полотно проходит узел сушки, накопитель и поступает в узел раската в рулоны.
Регулировка положения бумажного полотна относительно тиснильной пары осуществляет за счет регулировки величины его растяжения между тиснильной парой и узлом натяжения. Для осуществления процесса управления в контур системы управления введены следующие элементы. 1) в узел натяжения привод двигателя постоянного тока, регулирующий силу натяжения бумажного полотна. 2) в узел тиснильной пары преобразователь угловых перемещений, связанный с тиснильным валом и оптически датчик положения бумажного полотна. 3) контроллер системы управления. Входом для контроллера является информация о положение тиснильного вала и положение бумажного полотна, выходом является значение величины управляющего воздействия на привод тиснильного вала. 4) управляющий компьютер.
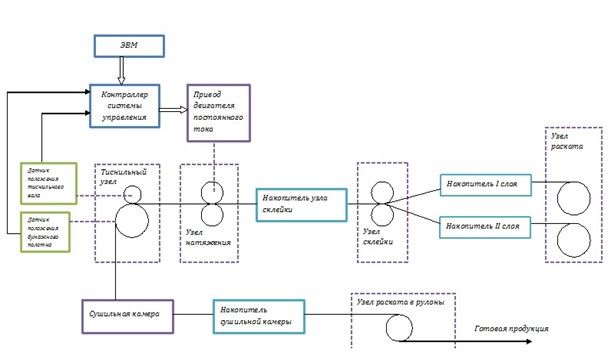
Контроллер СУ определяет угловое положение тиснильного вала с помощью преобразователя угловых перемещений и производит первичную обработку данных видео изображения с оптического датчика. Полученные данные поступают в компьютер, на котором реализован алгоритм пропорционального, интегрального, дифференциального регулирования, на основе которого определяется величина управляющего воздействия на привод узла натяжения.